가우스 채널 적응형 이동평균 전략

개요
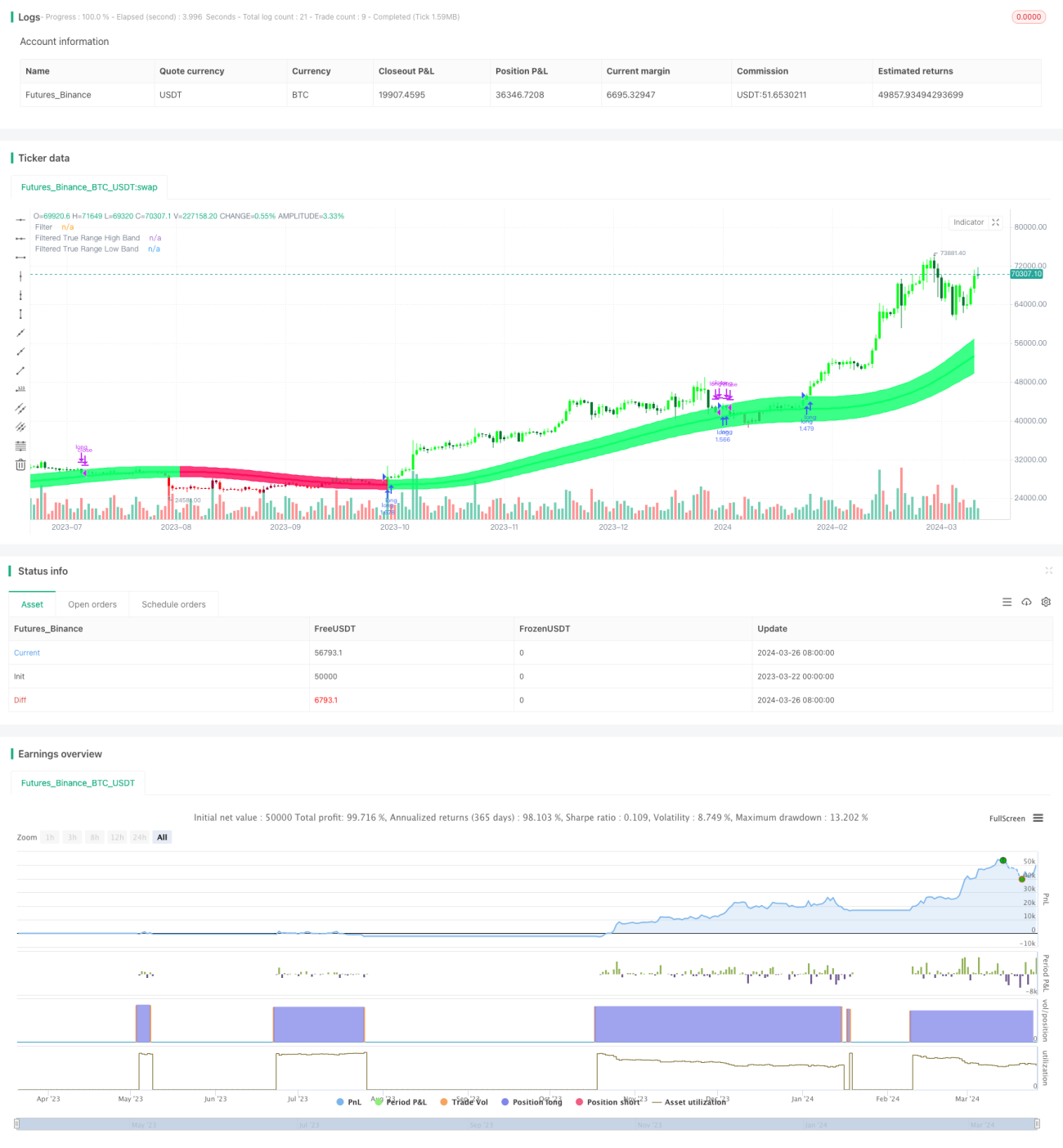
가우시안 채널 적응형 이동평균선 전략은 가우시안 필터 기술과 적응형 파라미터 설정을 활용한 정량적 거래 전략입니다. 이 전략은 John Ehlers의 가우시안 필터 이론에 기반하여, 가격 데이터에 대해 여러 번의 지수 이동평균을 계산하여 부드럽고 적응성이 뛰어난 거래 신호를 생성합니다. 전략의 핵심은 동적으로 조정되는 가격 채널을 구축하는 것이며, 상하단 밴드는 가우시안 필터링된 가격에 실제 변동폭을 더하거나 빼서 얻습니다. 가격이 상단 밴드를 돌파하면 매수, 하단 밴드를 돌파하면 매도 신호를 발생시킵니다. 또한, 이 전략은 시간대 파라미터를 도입하여 전략 실행의 시작 및 종료 시간을 유연하게 설정할 수 있어 실용성을 높였습니다.
전략 원리
가우시안 채널 적응형 이동평균선 전략의 원리는 다음과 같습니다:
- 가격의 가우시안 필터 값을 계산합니다. 사용자가 설정한 샘플링 주기와 극점 수에 따라 Beta 및 Alpha 파라미터를 계산한 후, 가격 데이터에 단계적으로 가우시안 필터를 적용하여 평활화된 가격 시계열을 얻습니다.
- 실제 변동폭의 가우시안 필터 값을 계산합니다. 가격의 실제 변동폭에 대해 동일한 가우시안 필터 처리를 수행하여 평활화된 변동폭 시계열을 얻습니다.
- 가우시안 채널을 구축합니다. 가우시안 필터링된 가격을 중간 밴드로 하고, 상단 밴드는 중간 밴드에 실제 변동폭에 사용자 설정 배수를 곱한 값을 더하며, 하단 밴드는 중간 밴드에서 해당 값을 빼서 동적 채널을 형성합니다.
- 거래 신호를 생성합니다. 가격이 채널 상단을 상향 돌파하면 매수 신호가 발생하고, 가격이 채널 하단을 하향 돌파하면 매도 신호가 발생합니다.
- 시간대 파라미터를 도입합니다. 사용자는 전략 실행의 시작 및 종료 시간을 설정할 수 있으며, 해당 시간대 내에서만 전략이 거래 신호에 따라 작동합니다.
장점 분석
가우시안 채널 적응형 이동평균선 전략은 다음과 같은 장점이 있습니다:
- 적응성이 뛰어납니다. 동적으로 조정되는 파라미터를 사용하여 다양한 시장 상황과 거래 종목에 적응할 수 있으며, 빈번한 수동 튜닝이 필요하지 않습니다.
- 추세 추종 성능이 좋습니다. 가격 채널을 구축함으로써 시장 추세를 효과적으로 포착하고 추종하며, 변동성 장세에서의 가짜 신호를 효과적으로 피할 수 있습니다.
- 평활성이 우수합니다. 가우시안 필터 기술을 사용하여 가격 데이터를 여러 번 평활화함으로써 대부분의 시장 노이즈를 제거하여 거래 신호의 신뢰성을 높입니다.
- 유연성이 높습니다. 사용자는 필요에 따라 샘플링 주기, 극점 수, 변동폭 배수 등의 전략 파라미터를 조정하여 전략 성과를 최적화할 수 있습니다.
- 실용성이 뛰어납니다. 시간대 파라미터를 도입하여 전략이 지정된 시간 범위 내에서만 실행되도록 할 수 있어 실전 거래 및 백테스트 연구에 편리합니다.
위험 분석
가우시안 채널 적응형 이동평균선 전략은 많은 장점이 있지만, 다음과 같은 위험이 존재합니다:
- 파라미터 설정 위험. 부적절한 파라미터 설정은 전략의 무효화 또는 성과 저하를 초래할 수 있으므로, 실제 적용 시 반복적인 테스트와 최적화가 필요합니다.
- 돌발 사건 위험. 예상치 못한 큰 이벤트에 직면했을 때 전략이 적시에 올바른 대응을 하지 못하여 손실이 발생할 수 있습니다.
- 과적합 위험. 파라미터가 과거 데이터에 너무 밀착되게 설정되면 미래 성과가 저조할 수 있으므로, 샘플 내외 성과를 모두 고려해야 합니다.
- 차익 거래 위험. 이 전략은 주로 추세 시장에 적합하며, 변동성 장세에서 잦은 거래가 발생할 경우 큰 차익 거래 위험에 직면할 수 있습니다.
최적화 방향
가우시안 채널 적응형 이동평균선 전략의 최적화 방향은 다음과 같습니다:
- 동적 파라미터 최적화. 머신러닝 등의 기술을 도입하여 전략 파라미터의 자동 최적화 및 동적 조정을 구현하여 적응성을 높입니다.
- 다중 요인 결합. 다른 유효한 기술 지표 또는 요인을 가우시안 채널과 결합하여 더 견고한 거래 신호를 형성합니다.
- 포지션 관리 최적화. 전략에 합리적인 포지션 관리 및 자금 관리 규칙을 추가하여 손실 폭과 위험을 통제합니다.
- 다중 종목 협업. 전략을 여러 다른 거래 종목으로 확장하여 자산 배분 및 상관관계 분석을 통해 위험을 분산합니다.
요약
가우시안 채널 적응형 이동평균선 전략은 가우시안 필터와 적응형 파라미터에 기반한 정량적 거래 전략으로, 동적으로 가격 채널을 구축하여 부드럽고 신뢰할 수 있는 거래 신호를 생성합니다. 이 전략은 적응성 우수, 추세 추종 성능 양호, 평활성 높음, 유연성 큼, 실용성 뛰어남 등의 장점이 있지만, 동시에 파라미터 설정, 돌발 사건, 과적합 및 차익 거래 등의 위험에 직면합니다. 향후 동적 파라미터 최적화, 다중 요인 결합, 포지션 관리 최적화, 다중 종목 협업 등의 측면에서 전략을 더욱 개선하고 발전시킬 수 있습니다.
/*backtest
start: 2023-03-22 00:00:00
end: 2024-03-27 00:00:00
period: 1d
basePeriod: 1h
exchanges: [{"eid":"Futures_Binance","currency":"BTC_USDT"}]
*/
//@version=4
strategy(title="Gaussian Channel Strategy v1.0", overlay=true, calc_on_every_tick=false, initial_capital=10000, default_qty_type=strategy.percent_of_equity, default_qty_value=100, commission_type=strategy.commission.percent, commission_value=0.1)
// Date condition inputs- 1