
개요
트리플 확인에 기반한 적응적 돌파구 추적 전략은 고전적인 기술 분석 이론과 현대적 위험 관리 기술을 결합한 양적 거래 전략이다. 이 전략은 제시 리버모어의 돌파구 이론, 에드 세이코타의 트렌드 확인 방법, 그리고 폴 튜더 존스의 ATR 위험 관리 원칙을 결합한 것으로, 다중 조건 필터링과 동적 중지 메커니즘을 통해 높은 확률의 트렌드 돌파구를 포착하는 것을 목표로 한다. 전략은 중심축 돌파구, 지수 이동 평균 트렌드 확인, 양적 검증 및 ATR 적응적 위험 통제의 통합 방식을 채택하여 전통적인 기술 분석과 현대적 양적 위험 관리의 유기적인 결합을 실현한다.
전략 원칙
이 전략의 핵심 원칙은 다단계 기술 분석 확인 메커니즘에 기반한다. 첫째, 전략은 최근 축의 고점과 낮은 지점을 식별하여 중요한 지지부진 지점을 결정한다. 가격이 이러한 중요한 위치를 돌파 할 때, 트렌드 확인 조건과 결합하여 진입 판단을 한다. 다중 신호를 하기 위해, 전략은 종결 가격의 최근 축의 고점을 돌파하는 것을 요구하며, 가격은 50 EMA 위에 있으며, 20 EMA는 200 EMA보다 높은 상승 추세이며, 현재 거래량은 20 단기 간단한 이동 평균선을 초과한다.
전략적 이점
이 전략은 여러 가지 기술적 이점을 가지고 있으며, 첫째로, 여러 가지 확인 메커니즘에 나타납니다. 중추점 돌파, 트렌드 필터, 거래량 확인의 삼중 검증으로 거래 신호의 신뢰성이 크게 향상되고 가짜 돌파의 확률이 감소합니다. 둘째, 전략의 적응성이 돋보이는 ATR 지표의 사용으로 손실 수치는 시장의 변동성에 따라 자동으로 조정 될 수 있으며, 높은 파동 동안 더 넓은 손실 공간을 제공하며, 낮은 파동 동안 긴밀하게 위험을 통제합니다.
전략적 위험
전략 설계가 완벽함에도 불구하고, 몇 가지 잠재적인 위험은 여전히 주의해야 합니다. 첫째, 흔들림 시장 위험, 시장이 수평 정리 상태일 때 빈번한 가짜 브레이크가 연속적으로 소액 손실을 초래할 수 있습니다. 해결책은 트렌드 강도를 판단하기 위해 ADX 지표와 같은 추가 시장 환경 필터를 추가하는 것입니다. 두 번째는 변수 민감성 위험입니다. 다양한 변수 설정으로 인해 전략 성능이 크게 달라질 수 있으며, 피드백 최적화를 통해 가장 적합한 변수 조합을 찾는 것이 필요합니다. 슬라이드 포인트 및 실행 위험도 무시해서는 안됩니다.
전략 최적화 방향
전략 최적화는 전반적인 성능을 향상시키기 위해 여러 차원에서 진행되어야 한다. 첫째, 다중 시간 프레임 분석을 도입하여 트렌드 방향을 확인한 후 더 낮은 시간 프레임에서 진입 기회를 찾을 수 있어 거래의 성공률을 높이고 역전 거래를 줄일 수 있다. 둘째, 시장 환경 식별 모듈을 추가하여 변동성 지표, 트렌드 강도 지표 등의 변동성 지표를 통해 현재 시장 상태를 판단하고, 돌파 전략에 적합하지 않은 환경에서 거래를 중단한다.
요약하다
삼중확인 기반의 적응형 돌파구 추적 전략은 기술 분석과 정량 거래가 결합된 전형적인 응용을 대표한다. 전략은 중심점 돌파구, 트렌드 확인, 거래량 검증 및 ATR 위험 관리와 같은 여러 기술적 요소를 통합하여 비교적 완전한 거래 시스템을 구축한다. 그것의 가장 큰 특징은 거래 신호의 품질을 보장하고 유연한 위험 관리를 제공하는 다중 확인 장치와 적응형 위험 관리에 있다. 그러나 전략의 성공적인 실행은 여전히 신중한 파라미터 최적화, 엄격한 위험 관리 및 지속적인 성능 모니터링이 필요합니다. 실제 응용에서는 더 많은 시장 분석 도구와 위험 제어 도구를 결합하고 다양한 시장 환경 및 거래 품목의 특성에 따라 적절하게 조정하는 것이 좋습니다.
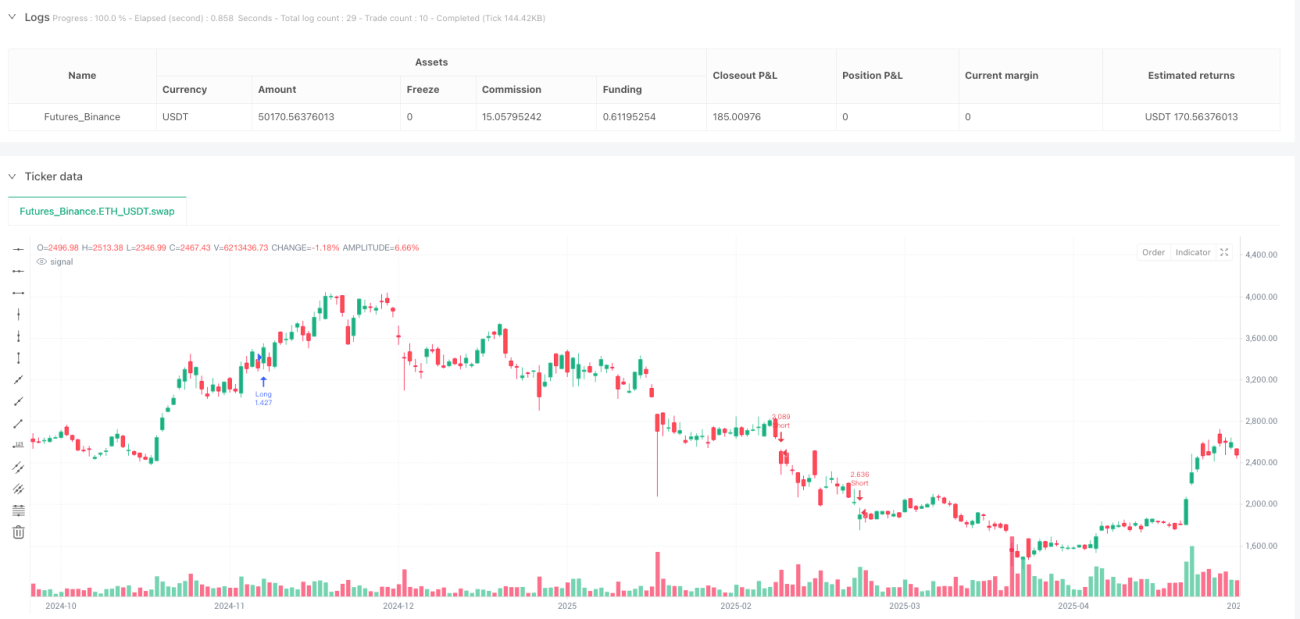
/*backtest
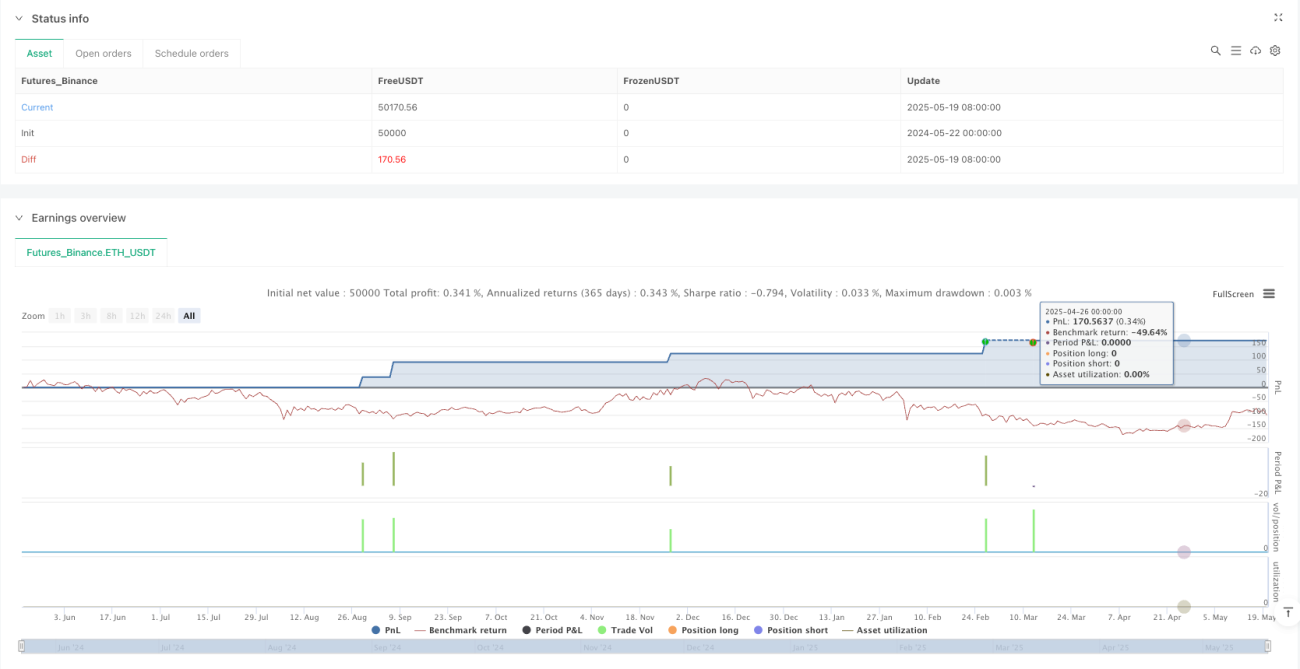
start: 2024-05-22 00:00:00
end: 2025-05-20 08:00:00
period: 1d
basePeriod: 1d
exchanges: [{"eid":"Futures_Binance","currency":"ETH_USDT"}]
*/
//@version=6
strategy("V2_Livermore-Seykota Breakout", overlay=true, default_qty_type=strategy.percent_of_equity, default_qty_value=10)
// === Input Parameters ===- 1