

소개
안녕하세요 여러분, 저는 "오크 퀀티터티브"입니다. 얼마전에 제가 개발한 시장 동향 알림 때문에 [대시보드 모니터링】는 누구나 널리 사랑받고 있으며, 동명의 서비스 계정[오크퀀티터티브]에서 동시 알림이 제공되며, 신규 및 기존 투자자에게 시장 동향을 판단하는 새로운 참고 자료를 제공합니다. 이러한 인기를 이용하여, 우리는 FMZ의 확장 API에 연결하여 로봇 간 메시지 통신을 실현하고 지정된 로봇에 시장 알림을 직접 푸시하기 시작했습니다. 이 글에서는 토론을 자극하기 위해 두 가지 응용 시나리오를 예로 들어 설명합니다. 여러분이 더 흥미로운 것들을 개발할 수 있기를 바랍니다...
이 기사에서는 주로 다음을 소개합니다.
- 개발자는 JS 언어를 통해 FMZ의 확장 API에 어떻게 연결합니까? (이 문서에서는 GetNodeList 메서드를 예로 들어 설명합니다.)
- 사례 1: 확장 API의 CommandRobot 메서드를 사용하여 모니터링 로봇과 다른 로봇 간의 메시지 통신을 구현합니다.
- 사례 2: 확장 API의 GetRobotDetail 메서드를 사용하여 여러 로봇 데이터에 대한 통합 모니터링 및 표시를 구현합니다.
1. JS를 사용하여 FMZ의 확장된 API에 연결
-
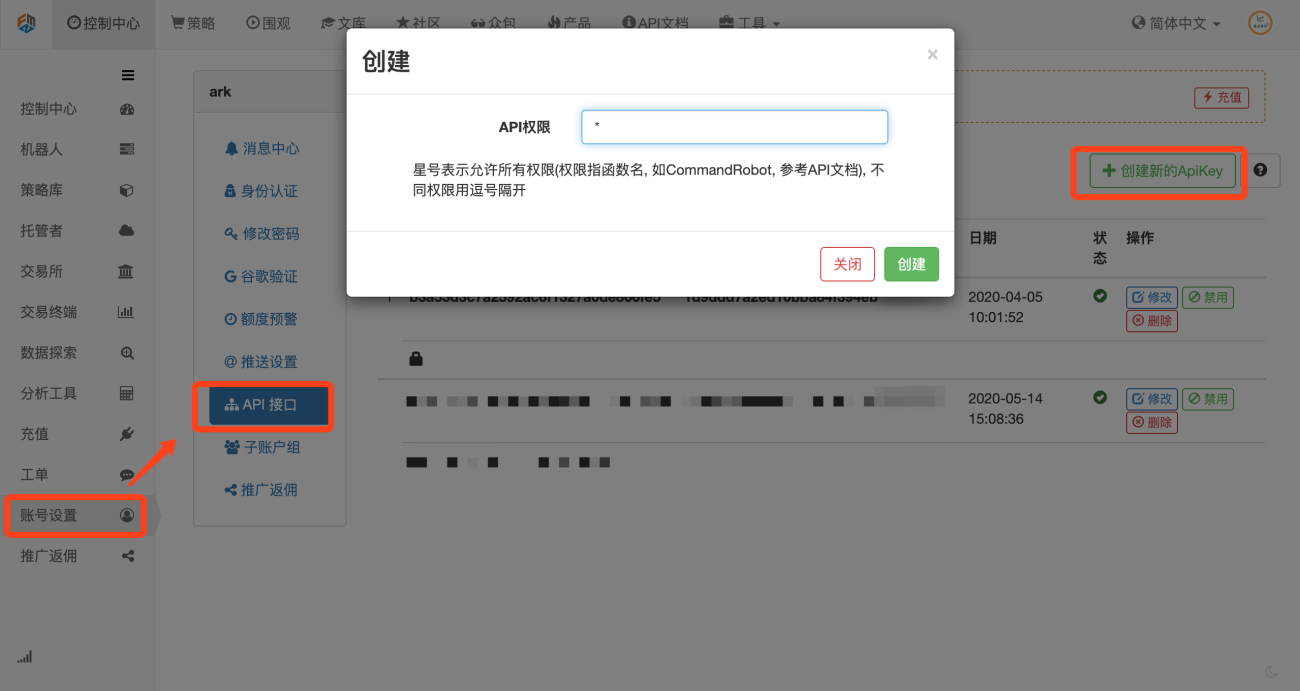
AccessKey와 SecretKey(이하 AK, SK라 함)를 신청합니다.
FMZ 공식 홈페이지에서 [계정 설정] -> [API 인터페이스] -> [새로운 ApiKey 생성] 메뉴에서 신청을 한 뒤, AK와 SK 세트를 얻어서 등록해 둡니다. (FMZ의 AK와 SK는 처음 생성될 때만 보이는 거래소와 다릅니다. FMZ에서는 [API 인터페이스] 메뉴에서 언제든지 AK와 SK의 전체 데이터를 볼 수 있습니다.)
-
확장 API 문서에 따라 개발
먼저 API 요청의 주요 단계를 살펴보겠습니다.
- FMZ API 인터페이스:
https://www.fmz.com/api/v1
- 기본 매개변수 요청
{
'version' : '1.0', //自定义版本号
'access_key': '8a148320e0bxxxxxxxxxxxxxx19js99f', //AK
'method' : 'GetNodeList', //具体调用的方法
'args' : [], //具体method算法的参数列表
'nonce' : 1516292399361, //时间戳,单位毫秒
'sign' : '085b63456c93hfb243a757366600f9c2' //签名(需要根据上面5个参数加密获取,下面有讲)
}
- 전체 요청 URL은 물음표 매개변수 전달 형태로 연결됩니다.
以GetNodeList方法为例
https://www.fmz.com/api/v1?
access_key=8a148320e0bxxxxxxxxxxxxxx19js99f&
nonce=1516292399361&
args=%5B%5D&
sign=085b63456c93hfb243a757366600f9c2&
version=1.0&
method=GetNodeList
- 서명방법
按照如下顺序进行参数拼接后,使用MD5加密算法加密字符串,并转换为十六进制数据字符串值,该值作为参数sign的值。
version + "|" + method + "|" + args + "|" + nonce + "|" + secretKey
- 요약하자면 다음과 같은 코드가 있습니다.
소스 코드 주소:[OakQuant]-JS 도킹 FMZ 확장 API 데모
var URL = "https://www.fmz.com/api/v1?";
var AK = "b3a53d3XXXXXXXXXXXXXXXXXXX866fe5";//这里替换成你自己的AccessKey
var SK = "1d9ddd7XXXXXXXXXXXXXXXXXXX85be17";//这里替换成你自己的SecretKey
function main() {
//获取5个基础参数对象
var param = getParam("1.0.0",AK,getArgs());
Log("param:",param);
//获取拼接参数md5加密后的结果
var md5Result = md5(param);
//赋值加密结果到基础参数对象中
param.sign = md5Result;
//获取请求api的URL
var finalUrl = getFinalUrl(param);
Log("finalUrl:",finalUrl);
//执行请求并打印结果
var info = HttpQuery(finalUrl);
Log("info:",info);
}
//获取基础5个参数的对象
function getParam(version,ak,args){
return {
'version': version,
'access_key': ak,
'method': 'GetNodeList',
'args': JSON.stringify(args),
'nonce': new Date().getTime()
}
}
//执行md5加密
function md5(param){
var paramUrl = param.version+"|"+param.method+"|"+param.args+"|"+param.nonce+"|"+SK
Log("paramUrl:",paramUrl);
return Hash("md5", "hex", paramUrl)
}
//获取最终请求URL
function getFinalUrl(param){
return URL+"access_key="+AK+"&nonce="+param.nonce+"&args="+param.args+"&sign="+param.sign+"&version="+param.version+"&method="+param.method;
}
//js中不支持...args的命名方式,所以改用arguments关键字获取参数数组
function getArgs(){
return [].slice.call(arguments);
}
사례 2: 확장 API의 CommandRobot 메서드를 사용하여 로봇 간 메시지 통신 구현
위 코드를 기반으로 CommandRobot 메서드를 사용하여 로봇 간의 메시지 통신을 구현해 보겠습니다.
먼저, CommandRobot(RobotId, Cmd) 메서드에 필요한 두 개의 매개변수를 살펴보겠습니다.
| 매개변수 이름 | 유형 | 의미 |
|---|---|---|
| RobotId | int | GetRobotList(...)를 사용하거나 로봇 세부 정보 페이지에서 얻을 수 있는 로봇 ID |
| Cmd | String | 봇에게 보내는 메시지 |
매개변수의 의미를 알았으니 다음으로 이 호출 메서드를 구현해 보겠습니다.
-
로봇 세부 정보 페이지에서 로봇 ID를 가져옵니다.

-
Cmd 메시지를 얻는 방법을 구현합니다.
//获取消息头信息
function getMessageBody(toUserName,msgType,content){
return ({
"toUserName":toUserName,//发送给谁
"fromUserName":AOKE_INFO,//消息来源
"createTime": new Date().getTime(),//当前时间戳
"msgType":msgType,//消息类型
"content":content,//消息内容
"msgId":Math.random().toString(36).slice(-8)//消息ID
})
}
//获取消息体趋势信息(消息头content字段的数据)
function getCtaDate(symbol,timeCycle,direction,nowCycleTime){
return {
"symbol":symbol,//交易币种
"timeCycle":timeCycle,//趋势周期
"direction":direction,//当前进入的方向,0:看空,1:看多
"createTime":new Date().getTime(),//当前时间戳
"nowCycleTime":nowCycleTime//当前进入的周期起始时间
}
}
- 메시지 전송을 위한 코드 수정
//发送消息前先获取消息
var sendMessage = getMessageBody("测试对象",'CTARemind',getCtaDate('BTC_USDT','120','0','2020-05-1620:00:00'));
//把机器人ID和消息体通过getArgs()方法获取,并传入基础参数。
var param = getParam("1.0.0",AK,getArgs(17777,sendMessage));
- 메인 메서드를 실행하고 메시지를 보내고 GetCommand() 메서드를 사용하여 메시지를 가져옵니다.
function main(){
while(true) {
var cmd = GetCommand()
if (cmd) {
Log(cmd)
}
Sleep(1000)
}
}
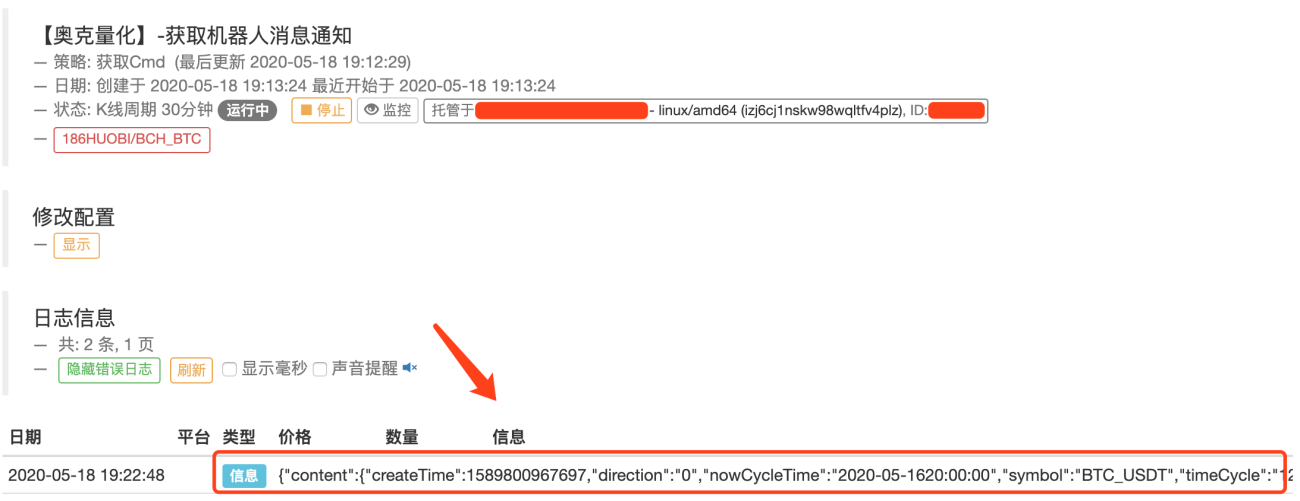
메시지가 성공적으로 전송되었습니다:

메시지를 성공적으로 받았습니다:
사례 3: 확장 API의 GetRobotList 및 GetRobotDetail 메서드를 사용하여 로봇 데이터를 모니터링하고 표시합니다.
마찬가지로 먼저 두 가지 방법의 매개변수 설명을 살펴보겠습니다.
GetRobotList(offset, length, robotStatus, label):
| 매개변수 이름 | 유형 | 의미 |
|---|---|---|
| offset | int | 쿼리 페이지 번호 |
| length | int | 쿼리 페이지 데이터 길이 |
| robotStatus | int | 모두 얻으려면 -1을 전달하세요 |
| label | String | 사용자 정의 태그는 이 태그가 있는 모든 로봇을 필터링할 수 있습니다. |
GetRobotDetail(RobotId):
| 매개변수 이름 | 유형 | 의미 |
|---|---|---|
| RobotId | int | 로봇 ID |
- GetRobotList 메서드를 통해 로봇 목록을 가져옵니다.
//获取机器人列表信息
var robotListJson = getAPIInfo('GetRobotList',getArgs(OFF_SET,PAGE_LENGTH,-1));
var robotList = robotListJson.data.result.robots;
- 로봇 세부 정보 얻기
//获取机器人详情信息
var robotDetailJson = getAPIInfo('GetRobotDetail',getArgs(robotId));
var robotDetail = robotDetailJson.data.result.robot;
- 콘솔은 테이블 데이터를 출력합니다.
function getLogPrient(infoArr){
return table = {
type: 'table',
title: '奥克量化的机器人展示',
cols: ['机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
rows: infoArr
};
}
- 요약하자면 다음과 같은 코드가 있습니다.
소스 코드 주소:[OakQuant]-확장 API를 이용해 로봇 정보를 얻고 표시하기
var URL = "https://www.fmz.com/api/v1?";
var AK = "b3a53d3XXXXXXXXXXXXXXXXXXX866fe5";//这里替换成你自己的AccessKey
var SK = "1d9ddd7XXXXXXXXXXXXXXXXXXX85be17";//这里替换成你自己的SecretKey
var OFF_SET = 0;//查询的页码下标
var PAGE_LENGTH = 5;//查询页的数据长度
function main() {
LogReset();
while(true){
//获取机器人列表信息
var robotListJson = getAPIInfo('GetRobotList',getArgs(OFF_SET,PAGE_LENGTH,-1));
//取出机器人列表信息
var robotList = robotListJson.data.result.robots;
//创建展示机器人信息的数组
var infoArr = new Array();
var infoArr_index = 0;
for (index = 0; index < robotList.length; index++) {
var robot = robotList[index];
//取出当前循环到的机器人ID
var robotId = robot.id;
//获取机器人详情信息
var robotDetailJson = getAPIInfo('GetRobotDetail',getArgs(robotId));
var robotDetail = robotDetailJson.data.result.robot;
//转换详情为数组对象
var arr = getLogPrientItem(robotDetail);
infoArr[infoArr_index] = arr;
infoArr_index++;
}
Log("infoArr:",infoArr);
LogStatus('`' + JSON.stringify(getLogPrient(infoArr)) + '`');
Sleep(30000);
}
}
function getLogPrient(infoArr){
return table = {
type: 'table',
title: '奥克量化的机器人展示',
cols: ['机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
rows: infoArr
};
}
//通过参数获取API信息
function getAPIInfo(method,dateInfo){
//获取5个基础参数对象
var param = getParam("1.0.0",AK,method,dateInfo);
//Log("param:",param);
//获取拼接参数md5加密后的结果
var md5Result = md5(param);
//赋值加密结果到基础参数对象中
param.sign = md5Result;
//获取请求api的URL
var finalUrl = getFinalUrl(param);
//Log("finalUrl:",finalUrl);
//执行请求并打印结果
var info = HttpQuery(finalUrl);
//Log("info:",info);
return JSON.parse(info);
}
//获取基础5个参数的对象
function getParam(version,ak,method,args){
return {
'version': version,
'access_key': ak,
'method': method,
'args': JSON.stringify(args),
'nonce': new Date().getTime()
}
}
//执行md5加密
function md5(param){
var paramUrl = param.version+"|"+param.method+"|"+param.args+"|"+param.nonce+"|"+SK
//Log("paramUrl:",paramUrl);
return Hash("md5", "hex", paramUrl)
}
//获取最终请求URL
function getFinalUrl(param){
return URL+"access_key="+AK+"&nonce="+param.nonce+"&args="+param.args+"&sign="+param.sign+"&version="+param.version+"&method="+param.method;
}
//js中不支持...args的命名方式,所以改用arguments关键字获取参数数组
function getArgs(){
return [].slice.call(arguments);
}
//获取展示详情对象'机器人ID','机器人名称','策略名称','下次扣费时间','已经消耗时间ms','已经消耗金额CNY','最近活跃时间','是否公开'],
function getLogPrientItem(robotDetail){
var itemArr = new Array();
var iteArr_index = 0;
itemArr[iteArr_index++] = robotDetail.id;
itemArr[iteArr_index++] = robotDetail.name;
itemArr[iteArr_index++] = robotDetail.strategy_name;
itemArr[iteArr_index++] = robotDetail.charge_time;
itemArr[iteArr_index++] = robotDetail.charged;
itemArr[iteArr_index++] = robotDetail.consumed/1e8;
itemArr[iteArr_index++] = robotDetail.refresh;
itemArr[iteArr_index++] = robotDetail.public == 0?"已公开":"未公开";
return itemArr;
}
효과 표시:

결론
실제로 확장하면 더욱 흥미로운 기능을 실현할 수 있습니다. 예를 들어, CommandRobot 메서드를 사용하여 각 로봇이 로봇 A에 하트비트 검사를 보내도록 합니다. 로봇 A가 기계에 하트비트가 없지만 로봇이 계속 작동 중임을 발견하면 FMZ 서비스 번호를 통해 알람을 발행할 수 있습니다. 이런 방식으로 _C() 데드 루프와 같이 프로그램 중단을 일으킬 수 있는 알람을 피할 수 있습니다.
이번 영감을 통해 FMZ 플랫폼에 더욱 흥미로운 기능이 추가되고 모두가 개발하고 오픈 소스화할 수 있기를 바랍니다.
마지막으로 FMZ 플랫폼과 Meng 씨, Chao 씨, Z 씨를 비롯한 모든 훌륭한 분들께 지원과 도움에 감사드리고 싶습니다. 고맙습니다~

