ロボット WeChat メッセージ プッシュ 実装 スキーム
作者: リン・ハーン優しさ, 作成日: 2020-07-24 09:52:33, 更新日: 2023-10-26 20:04:21
微信グループは,志向の友人が集まる公共の場所であり,定量的な取引のサークルの微信グループは例外ではありません.最近,多くのFMZユーザーは,微信グループにメッセージをプッシュする方法について尋ねています.例えば,彼らの戦略は取引信号を送信しますが,取引を自動化したくないのです.ロボットが提供する信号が参照として微信グループに送信されることを願っています.
この理由から,私はおそらく微信のインターフェイスを見て,公式アカウントが必要だと発見しました.これは特に便利ではありません. そこで私は異なるアプローチをとり,以下のソリューションを試してみることにしました. 私の限られた能力のために,この要件の最も基本的な機能のみが完了することができ,それは参照のみです.
実施計画
私はGolangのライブラリを使用する必要があります.github.com/go-vgo/robotgoこのライブラリによって達成されます.
まず コンピュータで サービスプログラムを実行します コードは次のとおりです
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
このサービスプログラムの機能は,リクエストを待つことです. リクエストを受け取った後,電話postMsgマウスの動きをシミュレートしたクリックと入力操作の連続を実行し, WeChat ソフトウェアのウィンドウを開き,事前に定義されたエリアをクリックし,要求に情報を入力し, WeChat グループに送信します.
2つのシナリオを確認しテストするために,微信のウィンドウ上のエリアをクリックします.postMsgクリックエリアを固定し,クリックエリアの座標のセットを計画します.つまり: クリックエリアによって記録された座標.arrArea上記のコードの変数です. 座標はどこですか? 答え: スクリーンショットのピクセル座標を見て T_T を測定します.
FMZプラットフォーム戦略試験プログラム
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
この戦略は,取引信号を送信するシミュレーションを行う (n==20の場合,この時点で取引信号が誘発され,取引が可能と考えられる場合),http://127.0.0.1:9090/data.
テスト
FMZ ロボット操作 (ドーカーもローカルで実行):

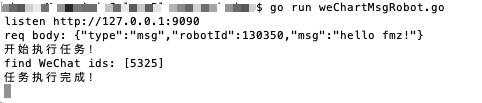
WeChatのウィンドウ

メッセージは:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
この計画はほんの始まりに過ぎません もしもっと良い計画があるなら 話し合ってもいいでしょう
- 暗号通貨市場の基本分析を定量化する: データが自分で話せ!
- 通貨圏の基礎的な定量化研究 - 数字を客観的に話すために,あらゆる
教師を信頼しなくていい! - 量化取引の必須ツール - 発明者による量化データ探索モジュール
- すべてをマスターする - FMZの新バージョンの取引ターミナルへの紹介 (TRB仲裁ソースコード)
- FMZの新バージョンの取引端末のご紹介 (TRBの利息ソースコード追加)
- FMZ Quant: 仮想通貨市場における共通要件設計例の分析 (II)
- 80行のコードで高周波戦略で 脳のない販売ボットを利用する方法
- FMZ定量化:仮想通貨市場の常用需要設計事例解析 (II)
- 80行コードの高周波戦略で脳のないロボットを搾取して売る方法
- FMZ Quant: 仮想通貨市場における共通要件設計例の分析 (I)
- FMZ定量化:仮想通貨市場の常用需要設計事例解析 (1)