Robot WeChat chương trình thực hiện tin nhắn đẩy
Tác giả:Tốt, Tạo: 2020-07-24 09:52:33, Cập nhật: 2023-10-26 20:04:21
Nhóm WeChat là một nơi công cộng nơi những người bạn cùng chí hướng tụ họp, và nhóm WeChat trong vòng tròn giao dịch định lượng cũng không ngoại lệ. Gần đây, nhiều người dùng FMZ hỏi làm thế nào họ có thể đẩy tin nhắn đến nhóm WeChat. Ví dụ, chiến lược của họ gửi tín hiệu giao dịch, nhưng họ không muốn tự động hóa giao dịch. Họ hy vọng rằng tín hiệu được cung cấp bởi robot có thể được gửi đến nhóm WeChat làm tài liệu tham khảo.
Vì lý do này, có lẽ tôi đã nhìn vào giao diện WeChat và thấy rằng một tài khoản chính thức là cần thiết, điều này không đặc biệt thuận tiện. Vì vậy, tôi quyết định tiếp cận khác và thử các giải pháp sau. Do khả năng hạn chế của tôi, chỉ có chức năng cơ bản nhất của yêu cầu này có thể được hoàn thành, và nó chỉ để tham khảo.
Kế hoạch thực hiện
Tôi quyết định sử dụng Golang để viết, cần phải sử dụng một thư viện Golanggithub.com/go-vgo/robotgo, về cơ bản các yêu cầu của giải pháp được đạt được bởi thư viện này.
Đầu tiên chúng ta chạy một chương trình dịch vụ trên máy tính của chúng ta, mã là như sau:
package main
import (
"fmt"
"time"
"github.com/go-vgo/robotgo"
"net/http"
"io/ioutil"
)
func postMsg (msg string) {
fmt.Println("Start the mission!")
// process ids
processIds := "WeChat"
fpid, err3 := robotgo.FindIds(processIds)
robotgo.ActivePID(fpid[0])
time.Sleep(time.Millisecond * 2000)
if err3 == nil {
fmt.Println(fmt.Sprintf("find %s", processIds), "ids:", fpid)
/* Use image recognition method to get the coordinates of the click area
arrPicFileName := []string{"pic1.png", "pic2.png", "pic3.png"}
for _, name := range arrPicFileName {
picPath := fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name)
fmt.Println("picPath:", fmt.Sprintf("/xxx/xxx/Desktop/xxx/%s", name))
fx, fy := robotgo.FindPic(picPath)
fmt.Println("move to :", fx+10, fy+10)
robotgo.MoveMouseSmooth(fx+10, fy+10)
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
*/
// /* Fixed area coordinates, the coordinates of the upper right corner of the screen are 0,0
arrArea := []map[string]int{
map[string]int{
"x" : 190,
"y" : 200,
},
map[string]int{
"x" : 190,
"y" : 200+70,
},
map[string]int{
"x" : 190,
"y" : 200+70+70,
},
}
for _, area := range arrArea {
robotgo.MoveMouseSmooth(area["x"], area["y"])
time.Sleep(time.Millisecond * 2000)
robotgo.MouseClick("left", false)
robotgo.TypeStr(msg)
time.Sleep(time.Second)
robotgo.KeyTap("enter")
time.Sleep(time.Second)
}
// */
}
fmt.Println("The mission is complete!")
}
func Handle (w http.ResponseWriter, r *http.Request) {
b, err := ioutil.ReadAll(r.Body)
if err != nil {
panic(err)
}
fmt.Println("req body:", string(b))
postMsg(string(b))
w.Write([]byte("finished!"))
}
func main () {
fmt.Println("listen http://127.0.0.1:9090")
http.HandleFunc("/data", Handle)
http.ListenAndServe("127.0.0.1:9090", nil)
}
Chức năng của chương trình dịch vụ này là chờ cho yêu cầu.postMsgchức năng để thực hiện một loạt các cú nhấp chuột mô phỏng và các hoạt động đầu vào để mở cửa sổ phần mềm WeChat, nhấp vào khu vực được xác định trước, nhập thông tin trong yêu cầu và gửi đến nhóm WeChat.
Nhấp vào khu vực trên cửa sổ WeChat để xác nhận và kiểm tra hai kịch bản.postMsglà kích hoạt, và tìm tọa độ để nhấp chuột. tỷ lệ nhận dạng của phương pháp này không phải là rất cao, và đôi khi nó không thể được nhận ra. Vì vậy, giải pháp thứ hai được sử dụng, đó là đáng tin cậy hơn. Nó là để cố định khu vực nhấp chuột và lập kế hoạch một tập hợp tọa độ của khu vực nhấp chuột, đó là: các tọa độ được ghi lại bởiarrAreaĐáp: Hãy nhìn vào tọa độ pixel của ảnh chụp màn hình và đo T_T.
Chương trình thử nghiệm chiến lược nền tảng FMZ:
function main() {
var msg = {
"type" : "msg",
"robotId" : _G(),
"msg" : "hello fmz!"
}
var n = 0
while(true) {
if(n == 20) {
var ret = HttpQuery("http://127.0.0.1:9090/data", JSON.stringify(msg))
Log("Exit")
break
}
n++
LogStatus(_D(), "n:", n)
Sleep(1000)
}
}
Chiến lược này mô phỏng việc gửi tín hiệu giao dịch (khi n==20, giả sử rằng tín hiệu giao dịch được kích hoạt tại thời điểm này, và nó được coi là có thể giao dịch), nó gửi yêu cầu đến dịch vụ địa phương tạihttp://127.0.0.1:9090/data.
Kiểm tra
Hoạt động robot FMZ (docker cũng chạy cục bộ):

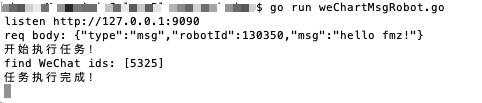
Cửa sổ WeChat

Tin nhắn đẩy là:
{"type":"msg","robotId":130350,"msg":"hello fmz!"}
Kế hoạch này chỉ là để bắt đầu, và nếu bạn có một kế hoạch tốt hơn, bạn được chào đón để thảo luận về nó.
- Xác định số lượng phân tích cơ bản trong thị trường tiền điện tử: Hãy để dữ liệu nói cho chính nó!
- Các nghiên cứu định lượng cơ bản của vòng đồng tiền - đừng tin vào những giáo viên mờ nhạt, nói khách quan về dữ liệu!
- Một công cụ thiết yếu trong lĩnh vực giao dịch định lượng - nhà phát minh mô-đun khám phá dữ liệu định lượng
- Kiểm soát mọi thứ - giới thiệu về FMZ Phiên bản mới của Terminal giao dịch (với mã nguồn TRB Arbitrage)
- Có tất cả các thông tin về FMZ phiên bản mới của giao dịch đầu cuối (được thêm mã nguồn TRB)
- FMZ Quant: Phân tích các ví dụ thiết kế yêu cầu chung trong thị trường tiền điện tử (II)
- Làm thế nào để khai thác robot bán hàng không có não với một chiến lược tần số cao trong 80 dòng mã
- FMZ định lượng: Phân tích các trường hợp thiết kế nhu cầu phổ biến của thị trường tiền điện tử (II)
- Cách khai thác robot vô trí tuệ để bán bằng chiến lược tần số cao 80 dòng mã
- FMZ Quant: Phân tích các ví dụ thiết kế yêu cầu chung trong thị trường tiền điện tử (I)
- FMZ định lượng: Các nhu cầu phổ biến của thị trường tiền điện tử