दोहरी चलती औसत रणनीति 360°

अवलोकन
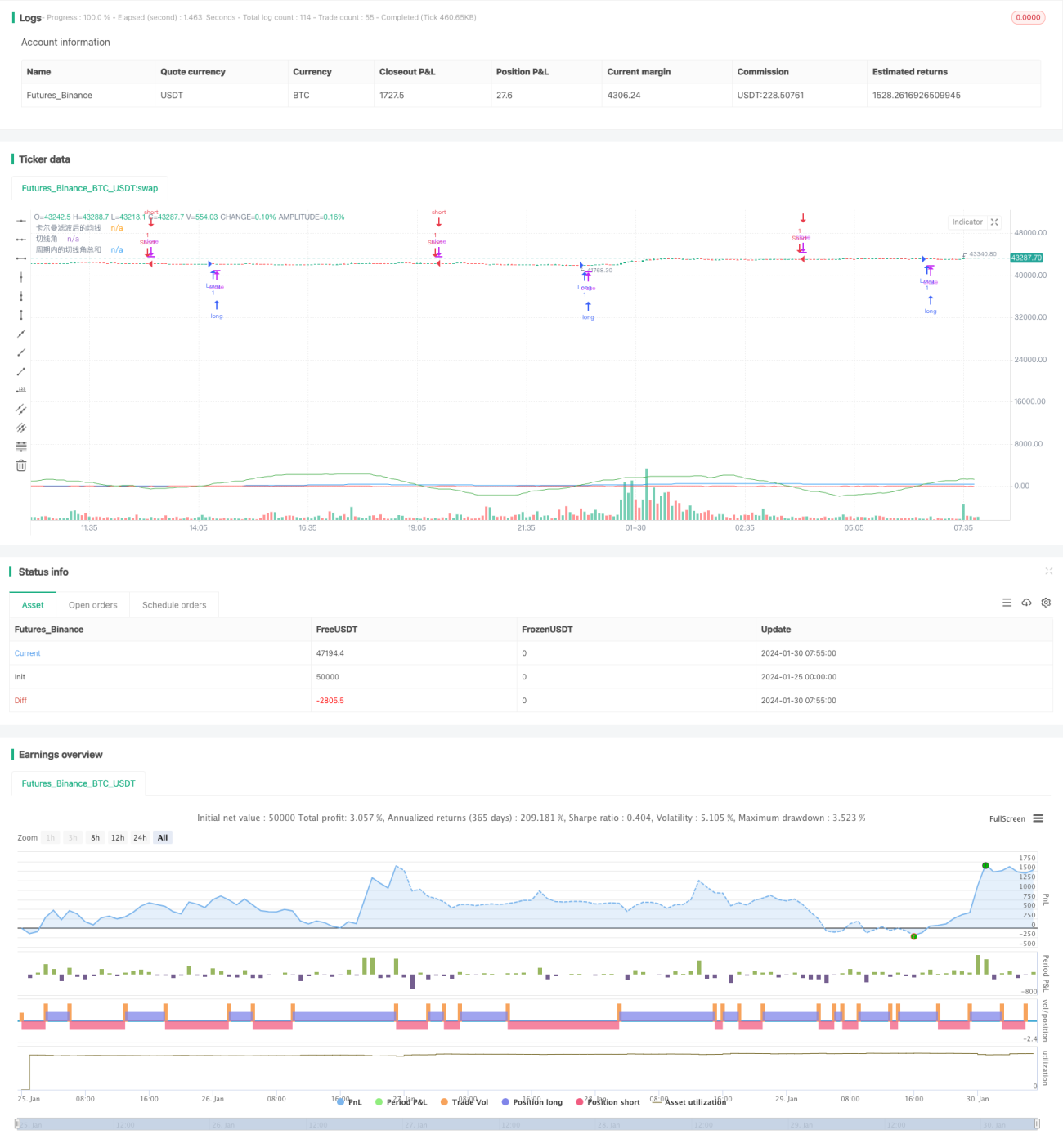
दोहरी मूविंग एवरेज रणनीति 360° एक मात्रात्मक ट्रेडिंग रणनीति है जो दोहरी मूविंग एवरेज और प्रवृत्ति शक्ति निर्धारण को एकीकृत करती है। यह रणनीति अलग-अलग अवधियों की मूविंग एवरेज की गणना करके मूल्य प्रवृत्ति का निर्धारण करती है; साथ ही, स्पर्शरेखा कोणों के संचय को जोड़कर प्रवृत्ति की ताकत का मूल्यांकन करती है, जिससे अधिक सटीक खरीद और बिक्री के अवसर चुने जा सकें।
रणनीति सिद्धांत
दोहरी मूविंग एवरेज रणनीति 360° का मुख्य तर्क इस प्रकार है:
- 1 मिनट की और कलमन फ़िल्टर के बाद की मूविंग एवरेज की गणना;
- दो मूविंग एवरेज के मूल्य अंतर से स्पर्शरेखा कोण की गणना;
- स्पर्शरेखा कोणों को जोड़कर प्रवृत्ति शक्ति संकेत प्राप्त करना;
- संचयी स्पर्शरेखा कोण निर्धारित सीमा से अधिक होने पर ट्रेडिंग सिग्नल जारी करना।
विशेष रूप से, रणनीति में 1 मिनट की मूल मूविंग एवरेज और कलमन फ़िल्टर के बाद की मूविंग एवरेज परिभाषित की गई है। कलमन फ़िल्टर मूविंग एवरेज में से कुछ शोर को हटा सकता है, जिससे यह अधिक चिकनी हो जाती है। फिर दो मूविंग एवरेज के स्पर्शरेखा कोण की गणना की जाती है, जो मूल्य में प्रवृत्ति परिवर्तन को दर्शाता है। उदाहरण के लिए, जब स्पर्शरेखा कोण सकारात्मक होता है, तो इसका अर्थ है कि मूल्य बढ़ रहा है; इसके विपरीत, यह गिरावट का संकेत देता है।
रणनीति 30 मिनट को गणना अवधि के रूप में चुनती है, और इस अवधि में सभी सकारात्मक और नकारात्मक स्पर्शरेखा कोणों का वास्तविक संचय करती है। जब स्पर्शरेखा कोणों का योग 360 डिग्री से अधिक हो जाता है, तो यह अत्यधिक मजबूत प्रवृत्ति का संकेत देता है और लॉन्ग सिग्नल जारी किया जाता है; इसके विपरीत, जब योग -360 डिग्री से कम होता है, तो यह प्रवृत्ति उलटने का संकेत देता है और शॉर्ट सिग्नल जारी किया जाता है।
लाभ विश्लेषण
दोहरी मूविंग एवरेज रणनीति 360° के मुख्य लाभ हैं:
- मूविंग एवरेज अल्पकालिक बाजार शोर को फ़िल्टर करता है, जिससे ट्रेडिंग निर्णय अधिक स्थिर और विश्वसनीय होते हैं;
- स्पर्शरेखा कोण प्रवृत्ति की तीव्रता को मात्रात्मक बनाता है, जिससे केवल मूविंग एवरेज के आकार पर आधारित व्यक्तिपरक निर्णय से बचा जा सकता है;
- कई स्पर्शरेखा कोणों के संचय का चयन करने से बेहतर डी-नॉइज़िंग प्रभाव होता है, और जारी किए गए ट्रेडिंग सिग्नल अधिक विश्वसनीय होते हैं;
- एकल मूविंग एवरेज रणनीति की तुलना में, दोहरी मूविंग एवरेज को प्रवृत्ति शक्ति निर्धारण के साथ जोड़ने से रणनीति अधिक व्यापक और मजबूत बनती है।
जोखिम विश्लेषण
दोहरी मूविंग एवरेज रणनीति 360° में कुछ जोखिम भी हैं:
- मूविंग एवरेज में अंतराल होता है, जिसके कारण अल्पकालिक प्रवृत्ति मोड़ छूट सकते हैं;
- केवल मात्रा-संचित प्रवृत्ति शक्ति संकेतों पर निर्भर रहने से बाजार में उतार-चढ़ाव आसानी से प्रभावित हो सकता है;
- पैरामीटर सेटिंग (जैसे गणना अवधि की लंबाई) अनुचित होने पर ट्रेडिंग के अवसर चूक सकते हैं या गलत सिग्नल उत्पन्न हो सकते हैं।
उपरोक्त जोखिमों को कम करने के लिए, मूविंग एवरेज अवधि को छोटा किया जा सकता है, पैरामीटर संयोजनों को अनुकूलित किया जा सकता है, और स्टॉप-लॉस तंत्र जोड़ा जा सकता है।
अनुकूलन दिशाएँ
दोहरी मूविंग एवरेज रणनीति 360° में आगे अनुकूलन की गुंजाइश है:
- बाजार की अस्थिरता के अनुसार मूविंग एवरेज पैरामीटर को समायोजित करने के लिए अनुकूली मूविंग एवरेज जोड़ना;
- एक अनुकूलित पैरामीटर संयोजन बनाने के लिए कई मूविंग एवरेज अवधियों के संदर्भ जोड़ना;
- अस्थिरता, ट्रेडिंग वॉल्यूम आदि पर आधारित गतिशील प्रवृत्ति निर्धारण मॉड्यूल जोड़ना;
- पैरामीटर समायोजन या ट्रेडिंग निर्णयों में सहायता के लिए मशीन लर्निंग मॉडल को शामिल करना।
निष्कर्ष
दोहरी मूविंग एवरेज रणनीति 360° मूविंग एवरेज फ़िल्टरिंग और स्पर्शरेखा कोण मात्रात्मक प्रवृत्ति निर्धारण का एकीकृत उपयोग करके एक अपेक्षाकृत मजबूत मात्रात्मक ट्रेडिंग रणनीति प्राप्त करती है। एकल तकनीकी संकेतकों की तुलना में, यह रणनीति अधिक व्यापक विचार बनाती है और इसमें मजबूत व्यावहारिकता है। फिर भी, पैरामीटर समायोजन और जोखिम प्रबंधन पर ध्यान दिया जाना चाहिए, और भविष्य में रणनीति के प्रभाव को और बेहतर बनाने के लिए अनुकूलन जारी रखा जा सकता है।
- 1